3D CFD 압축수 방출 시뮬레이션을 고려한 잠수함 발사체의 발사 성능에 대한 시스템 해석 및 검증
Abstract
The Weapon Launching System (WLS) in submarines is a critical system that launches various weapons through horizontal tubes. A submarine Air Turbine Pump (ATP) launch system using high‑pressure air to drive a turbine‑pump that rapidly pressurizes water for projectile ejection was investigated through integrated one-dimensional/three-dimensional (1D-3D) modeling, simulation, and experimental validation. This paper presents a coupled 1D-3D simulation framework for an air turbine pump based underwater launch system, integrating thermodynamic modeling of compressed air, turbine pump shaft dynamics, water pressurization, and projectile motion into a unified model. Key turbine and pump performance characteristics were derived from high-fidelity 3D computational fluid dynamics (CFD) analyses and embedded into the 1D system simulation to ensure realistic component behavior. The integrated model’s predictions were validated against land-based experimental data, including turbine rotation speed (RPM), system pressure, water flow rate, and projectile velocity, demonstrating good baseline agreement.
Keywords:
Weapon Launching System, Air Turbine Pump, 6-DOF CFD, System Analysis, Model Calibration, Parameter Identification키워드:
수평발사체계, 에어터빈펌프, 6자유도 전산유체역학, 시스템해석, 모델보정, 매개변수 추정1. 서 론
잠수함의 수평발사체계(WLS: Weapon Launching System)는 어뢰, 기뢰, 미사일 등 다양한 무장을 수평 발사관을 통해 사출하는 핵심 시스템이다. 최근 국내에서는 무장 사출 성능 요구조건을 충족하기 위해 필요한 유량, 차압 등과 같은 에어터빈펌프(ATP: Air Turbine Pump) 또는 워터램(Water Ram) 성능 요구 사항을 정의하고, 3차원 모델링을 통해 유동해석을 수행하여 목표 성능을 예측하고 검증 하는 연구가 활발히 진행되고 있다(1-3).
압축수를 이용한 수중 발사 시스템의 발사해석을 수행하기 위해서는 동력 생성을 위한 압축공기 공급 시스템, 터빈-기어-펌프가 연결된 동력전달시스템, 그리고 펌프 압력에 따른 발사체 거동 등을 종합적으로 예측해야 한다. 그러나 수중 발사 시스템의 사출성능은 각 부체계의 물리적 상호작용이 완전 연성되어 실제 작동 조건에서 복합적으로 나타나므로, 모든 현상을 단일 해석 모델로 동시에 시뮬레이션하는 것은 산업 현장에서 요구되는 연구 기간과 비용을 충족하기 어렵다. 이에 따라 1차원 해석으로 전체 시스템 성능을 예측한 뒤, 3차원 수치해석을 통해 이를 보정하는 방법이 널리 활용되고 있다(4,5).
본 연구에서는 발사밸브 제어에 따른 ATP 시스템의 운전 성능 및 사출 성능을 예측하기 위해 1D 시스템 해석을 수행하였다. 예측된 펌프 출력을 3D CFD 압축수 방출 시뮬레이션을 통해 보정하고 시험과 비교를 통해 무장 사출 성능을 평가하였다.
2. 에어터빈펌프 기반 수평발사시스템 모델링
2.1 수평발사시스템 프로세스
Fig. 1은 수중 발사 시스템의 발사체 모델링을 나타낸 것으로 압축공기 공급시스템, 터보펌프 시스템, 해수유입 시스템 등 여러 서브 시스템으로 구성된다. 압축공기 공급시스템이 최적 운전조건으로 운용되면 ATP의 터빈이 구동되어 기계적 에너지를 생성하고, 이는 감속기를 통해 감속, 토크 변환 과정을 거쳐 해수 유입구조에 연결된 펌프를 구동하여 무장을 사출한다. 이 과정에서 다양한 설계⋅운전 변수가 상호 작용하여 무장 사출 성능을 결정한다. 압축공기 공급시스템은 고압 압축공기를 저장하는 압축공기 실린더, 터빈에 질량유량을 공급하는 발사밸브, 발사밸브를 구동하는 유압제어 블록, 그리고 이를 연결하는 배관으로 구성된다.

Schematic diagram of ATP system modeling
본 연구에서는 압축공기 실린더부터 발사밸브, 연결배관, 에어터빈펌프의 터빈부까지 이어지는 압축성 유동을, 발사밸브 개방 프로파일에 따라 3D CFD 시뮬레이션을 수행하였다. 이어서 등엔트로피 과정을 가정한 1D 시스템 시뮬레이션 결과와 비교 및 보정함으로써 성능 예측의 정확도를 높였다.
압축공기 공급시스템에서 생성된 고압의 공기는 노즐을 통과하면서 고속의 공기로 변환되어 터빈 휠을 구동한다. 이후 소형 다단 감속기를 통해 높은 RPM/낮은 토크에서, 낮은 RPM/높은 토크로 변환되며 이를 통해 해수를 빠르게 발사관으로 이송하여 압축수를 생성한다.
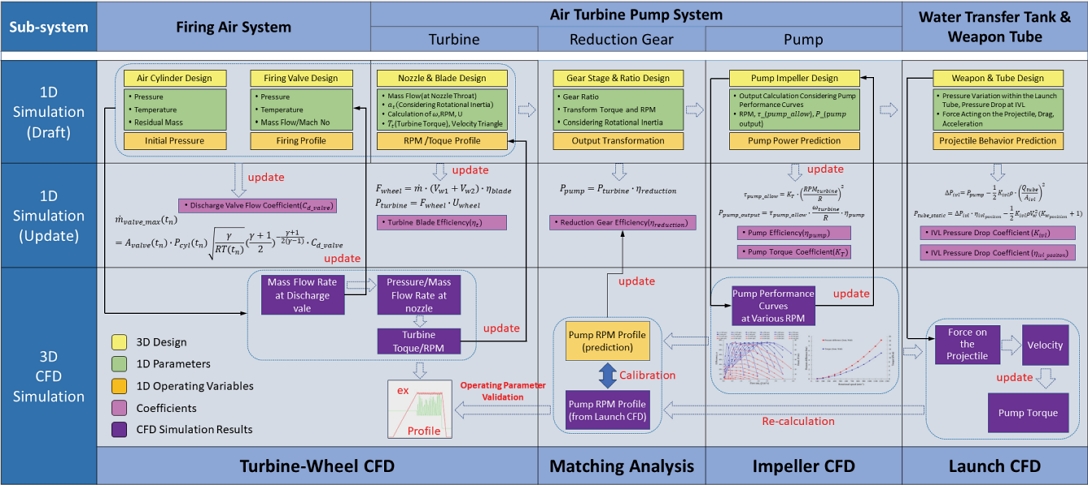
Table 1은 WLS의 발사 프로세스 계산을 요약한 것이다. 1D-3D 연계 시뮬레이션 결과를 활용하여 터빈 휠의 RPM과 토크를 예측한 뒤, 감속기 효율과 펌프의 성능곡선을 적용해 펌프 임펠러의 RPM과 토크를 산출하였다. 산출된 펌프 임펠러의 RPM은 3D CFD 압축수 방출 시뮬레이션에 적용해 임펠러 회전에 따른 무장 사출 성능을 평가하는 데 활용하였다.

System analysis for calculating the launching process of WLS
2.2 발사체 거동의 1D 시스템 모델링
발사관으로 토출되는 총 유량 Qpump는 발사체 단면을 따라 전진하는 유량 Qweapon_velocity와 초크링(Chock Ring: 압축수 생성방식의 발사관 내부에 발사효율을 극대화하기 위한 발사체 평행부 끝단과 발사관 내경 사이에 설치된 환형의 인써트)을 통해 새어 나가는 누설 유량 Qcr의 합으로 발사체 내부의 연속방정식은 식 (1)과 같다.
| (1) |
여기서, Acr은 초크링과 발사체 사이의 단면적으로 설계값을 적용하였다.
다음으로, 에너지 방정식을 적용하여 발사관 해수유입구에서의 압력-속도 관계를 도출하였다. 펌프에 의해 해수가 가속⋅압축되는 과정은 비점성 유동(Inviscid Flow)으로 마찰 손실(Friction Loss)을 무시하며 유선에 따라 흐른다고 가정할 때 베르누이 방정식(Bernoulli Equation)을 사용할 수 있다.
펌프로 인해 승압된 해수가 발사관 해수유입구를 지나 발사관 내부로 흐를 때, 유입구 직전의 펌프의 승압된 압력을 Ppump, 해수유입구 단면 직후의 전압을 Pivl, 그때의 유속을 Vivl, Kivl은 마찰에 의한 압력손실계수라 하면 압력-속도 관계식은 다음과 같이 나타낼 수 있다.
| (2) |
여기서, Kivl는 해수유입구 압력강하 계수로 발사해석을 통해 역산한 값인 0.2를 사용하였다. Vivl은 해수유입구 개구부의 평균유속으로 아래 식과 같다.
| (3) |
여기서, Aivl는 개구부 단면적이다. Vcr은 초크링과 발사체 사이의 유속으로 식 (4)와 같이 발사관 해수유입부 개구부 이후의 압력 Pivl을 고려한 초크링과 발사체 간극의 오리피스 방정식을 적용하였다(8).
| (4) |
여기서, 초크링 간극의 유량계수는 Cd≈1로 간주하였고 따라서 식 (1)은 아래와 같이 나타낼 수 있다.
| (5) |
식 (5)는 시간에 따른 펌프의 공급유량이 어디에 사용됨을 나타내는 연속방정식으로 초기에는 발사체 속도가 0 이므로 대부분이 압력상승에 사용된다.
발사체는 발사관 내에서 압축된 유체 힘을 받아 앞으로 병진 운동을 하며, 이러한 발사체 운동에 대한 지배방정식은 아래 식 (6)과 같다.
| (6) |
여기서, 좌변의 M은 발사체 질량, ma는 부가질량으로, 전체 좌변은 발사체 가속에 따른 운동량 변화를 나타낸다. 우변 첫 번째 항은 발사체에 작용하는 추진력으로 발사체의 단면적과 발사체에 작용하는 압력의 곱이다. 이때 Pivl은 발사관 유입부에서 측정되는 총압력인데, 발사체가 이동하면 유체의 속도 성분이 생기면서 총압력 중 일부가 동압으로 전환된다. 따라서, 괄호 안에서 를 빼주는 것은 총 압력에서 동압을 제외해 발사체에 작용하는 순수한 정압을 반영하기 위한 것이다.
또한, Aweapon은 발사체 단면적으로 설계값을 적용하였고, ηdischarge는 압력 손실을 보정하는 압력 전달 효율이다. Pivl을 그대로 적용하면 마찰 등 손실이 고려되지 않아 추진력이 과대 평가될 수 있으므로, 보정 계수 ηdischarge를 곱한다. 마지막으로 FD 는 발사체 주위의 항력, Ff 는 마찰력이다. 따라서, 식 (6)의 발사체 운동방정식을 시간에 따라 수치 적분하여 발사체 속도, 변위를 얻을 수 있다.
2.3 발사 시스템 파라미터 추정 및 검증
펌프 임펠러 유동해석을 수행하여 도출된 각 RPM 별 펌프 성능(유량, 토크 등) 데이터를 기반으로 펌프 출력을 예측하였다. 펌프의 입력과 출력 간의 이론적 관계는 식 (7)과 같이 표현된다.
| (7) |
여기서, Powerpump는 펌프의 입력 출력, T는 펌프 구동 토크, ω는 임펠러 각속도, Ppump는 펌프의 압력, Qpump는 펌프의 유량, η는 펌프의 효율로 펌프 CFD 시뮬레이션을 통해 얻은 각 RPM 별 성능곡선을 통해 확인하였다.
ATP 기반 1D 시스템 시뮬레이션은 초기 펌프 구동 구간에서 유량이 매우 작아 압력이 비정상적으로 높게 계산되는 문제가 발생할 수 있다. 이러한 발산을 방지하기 위해 RPM 별 최대 압력값에 대한 제한 조건을 설정하였다. 이때 사용된 기준 압력값은 정상상태 및 비정상 CFD 해석을 통해 유량이 0에 가까이 수렴할 때의 계산 결과를 기반으로 하였다.
1D 시스템 시뮬레이션에서는 터빈 토크는 오일러 터빈 방정식에 기반한 속도 삼각형 이론을 이용하여 계산하였다. 그러나 실제 터빈의 토크-회전속도 특성을 보다 정확하게 반영하기 위해, CFD 시뮬레이션으로부터 도출된 성능 맵과 일치하도록 토크 보정계수를 적용하였다(9,10).
Table 2는 CFD 시뮬레이션 기반의 RPM에 따른 토크 보정계수를 나타낸 것이다. 또한, Table 3은 CFD 시뮬레이션 기반의 발사밸브 개폐량에 따른 유량계수를 나타낸 것이다. 이러한 보정 과정은 다음 두 가지 방식으로 수행되었다.
- ⋅ 토크 보정: 이론식으로 계산된 터빈 토크에 CFD 시뮬레이션 기반의 토크 곡선과 일치하도록 토크 상수를 곱하여 보정함
- ⋅ 유량 보정: 터빈 유로 내 유량 계수를 조정하여, 주어진 입구 압력 조건 하에서 1D 시스템 시뮬레이션의 질량 유량이 CFD 시뮬레이션 결과와 일치하도록 보정함
Torque correction coefficients vs. turbine RPM from CFD simulation
Flow coefficients corresponding to discharge valve opening
이 과정을 통해 CFD 시뮬레이션 결과로부터 도출된 터빈 성능 맵을 1D 시스템 시뮬레이션에 반영하였으며, 오일러 기반의 토크 방정식이 실제 CFD 시뮬레이션 기반의 토크–회전속도 곡선을 잘 추종하도록 설정되었다.
Fig. 1에서 보듯이 발사관과 발사체의 발사 전 배치가 발사체의 평행부가 발사관의 해수 유입부를 막고 있는 형상이므로 발사체가 해수 유입부를 지나지 않은 시점에는 ηdischarge ≃0.6, 발사체가 해수 유입구를 지나 후방이 완전히 트인 뒤에는 ηdischarge ≃0.9까지 1D 시스템 모델에 발사체에 작용하는 정압 전달 손실을 모사하였다. 이는 3D CFD 발사시뮬레이션을 통해 그 경향이 유사함을 확인하였다.
3. 6 자유도 3D CFD 압축수 방출 시뮬레이션
1D 및 3D 연계 시뮬레이션(Co-simulation)을 통해 도출된 발사 밸브 개방 프로파일에 따라 변동하는 임펠러 출력을 반영하여, 발사체 압축수 방출 시뮬레이션을 수행하였다.
3.1 발사해석 모델링
Fig. 2는 ATP 기반 수평 발사 시스템의 시험장비 구조를 나타낸 것으로 펌프 임펠러의 형상과 시간에 따라 변화하는 회전 수를 반영하여 압축수 방출 및 무장 발사 상황을 시뮬레이션 하였다.

Structure of the ATP based launch system test equipment
Fig. 3은 수평 발사 시스템의 시험장비 및 발사체에 대한 격자를 나타낸 것이다. 격자는 Hexa, Tetra를 혼용하여 580만개의 절점과 880만개의 요소로 구성하였다. 펌프와 발사체 주변 영역은 다른 영역보다 조밀하게 구성했다. CFD 시뮬레이션은 상용 수치해석 소프트웨어 ANSYS Fluent 2024R2를 사용하였으며, 난류 모델은 Shear Stress Transport k-ω를, 작동 유체는 바닷물의 밀도와 점성을 사용하였다(10). 해석에 사용된 Time Step은 5e-5[s]이며, 발사체가 시험 장비의 끝에 도달하는 Total Time 1.7[s]까지 수행하였다. 압축수에 의한 발사성능을 예측하기 위해 6 자유도 운동기법을 사용하여 임펠러에서 송출된 압력에 따른 발사체 작용 힘과 이동속도를 예측하고 발사체를 물리적으로 이동시켰다. 6 자유도 운동은 구조물에 작용하는 유체 압력을 힘으로 변환하여 역학적 계산을 통해 구조물의 가속도를 계산하고 이에 따른 속도 및 이동 거리를 해석에 적용하는 방법이다. 이는 동적 격자의 변형을 통해 해석에서 구현되어야 하는데 이를 위해 Fluent MDM(Moving and Deforming Mesh) 기법을 사용하였다(Fig. 4)(11). 따라서 발사체의 이동에 맞춰 격자를 변형하여 늘어나거나 줄어드는 체적을 해석에 포함하여 이동에 따른 압력변화를 정확하게 계산하는 것이 가능하다.

Grid system of the launch vehicle and test equipment

6-DOF motion model of the launch vehicle and moving mesh region
3.2 6 자유도 3D CFD 시뮬레이션 결과
6 자유도 운동 기반 발사체 해석에서는 발사체의 전면부와 후면부에 작용하는 압력을 유동해석을 통해 계산하고, 이를 발사체에 작용하는 힘으로 변환하여 발사체를 가속하고 발사체의 속도를 계산하였다.
Fig. 5는 시간에 따른 발사체 주변 압력 분포를 도시한 것이다. 펌프의 임펠러가 회전하기 시작하면 압축수 방출이 시작되고 발사체에 압력이 작용하기 시작한다. 발사체가 전진함에 따라 압축수의 압력이 달라지게 되며 작용하는 힘과 가속도에 영향을 미친다.

Time-dependent pressure distribution around the launch vehicle
Fig. 6은 1D 시스템 시뮬레이션에서 예측한 결과와 3D CFD 시뮬레이션 결과를 비교한 그래프이다. 1D 및 3D 예측결과를 살펴보면 시간에 따라 변화하는 펌프의 토크와 발사체의 속도 경향은 두 해석결과가 유사함을 알 수 있다. 3D CFD 시뮬레이션 결과에서 무장 사출 속도는 평가기준의 속도를 약 30% 상회하는 것으로 나타났다. 따라서 보안상의 이유로 고려하지 못한 무장의 실제 형상이나 표면 마찰 저항 등에 따른 추가적인 손실이 반영되더라도, 충분히 목표 속도를 만족할 것으로 판단된다.

Comparison between the 1D system simulation and 3D CFD simulation results
4. 발사 시험 및 검증
사출시험 수조와 개발된 압축공기 공급시스템, 터보펌프시스템, 해수유입시스템을 통합한 육상 시험환경에 대해, 동일한 시험조건의 1D 시스템 모델 및 3D 연계 시뮬레이션 결과로부터 얻은 무장 사출 성능을 시험결과와 비교하였다.
4.1 시험 장비 및 시험 조건
Fig. 7은 시제 3종과 통합된 시험설비를 나타낸다. 발사력 시험 검증은 무장 사출 운용환경을 고려하여 압축공기 충진 압력 200bar 이하로 발사 시험을 수행 (무장의 제원 중량 2.2 ton)하였다. 요구 토출량(3 m3/s 이상), 해수 이송 탱크 정상 차압(12 bar 이하)으로 작동하는 터부펌프가 요구성능(속도 11 m/s 이상, 가속도 8G 이하)을 만족하여 무장을 사출할 수 있는지를 검증하였다.

(a) Components of the launch tube test equipment for ATP system and (b) Launch vehicle escape video image
4.2 1D 시스템 시뮬레이션 및 시험 결과 비교
Fig. 8은 1D 시스템 모델(이상 기체 및 등엔트로피 가정)과 실험을 통해 얻은 압축공기 실린더 내부 압력의 시간변화를 비교한 결과를 나타낸 것이다.

Comparison of residual pressure for test vs simulation
전반적인 압력 강하 양상은 유사하게 나타났다. 그러나 초기 약 1.0 s 구간에서는 해석 결과의 압력이 실험에 비해 더 빠르게 감소하여 일시적으로 약 10% 정도 낮은 압력이 계산되었다. 이러한 초기 압력 강하 차이는 해석 모델에서 이상 기체의 등엔트로피(가역 단열) 팽창을 가정함에 따라, 초기 질량유량이 급격히 배출되면서 압력이 빠르게 떨어지는 경향이 나타난 원인이라고 판단된다. 본 해석은 실린더 내부 압축 과정을 단열 조건으로 가정하여 수행하였다. 반면, 실험에서는 메인 유로에서 분기된 브랜치 라인에 압력 센서를 설치하여 계측된다. 이러한 센서 위치는 실린더와 센서 사이에 추가적인 유로 저항과 체적 탄성 효과를 발생시켜 감쇠(damping) 및 시간 지연이 발생된다. 그 결과, 실험에서 측정된 압력 곡선은 해석 결과와 비교할 때 압력 변화가 지연 되고 완만하게 나타나는 경향을 보인다.
Fig. 9는 시간에 따른 터빈 RPM 변화를 비교한 결과를 타나낸 것이다. 1D 시스템 시뮬레이션 결과와 실제 시험값이 매우 유사한 경향을 보이는 것으로 확인되었다.

Comparison of RPM for test vs simulation
이는 시뮬레이션에 적용된 터빈 발생 토크와 펌프 구동 토크의 예측이 실제 시스템에서의 동작과 높은 정합성을 가진다는 것을 의미하며, 두 토크 간의 균형 관계가 1D 시스템 시뮬레이션에 정확히 반영되었음을 의미한다. 특히, CFD 시뮬레이션 기반으로 설정된 토크 보정 계수, 유량계수, 그리고 발사 밸브 개방 프로파일이 실제 시험 환경에서의 터빈 및 펌프 시스템의 거동을 효과적으로 재현하고 있음을 입증하는 결과이다.
Fig. 10은 시간에 따른 발사체 속도 변화를 비교한 결과를 나타낸 것이다. 최대 속도 도달 이전 구간에서는 1D 시스템시뮬레이션 결과와 실제 시험값이 매우 유사한 경향이 나타남을 확인할 수 있었다.

Comparison of projectile velocity for test vs simulation
발사체의 초기거동 시점에서 시험의 경우 약 0.67 s까지 발사체가 정지해 있다가 이후 가속이 시작된 반면, 1D 시스템 시뮬레이션은 약 0.59 s부터 발사체가 이동이 시작하여 시험보다 이른 시점에 속도가 발생하였다. 이로 인해 0.8 s시점의 시험 속도는 0.9 m/s인데 시뮬레이션은 2.58 m/s로 약 1.68 m/s 높게 나타났다. 발사체가 본격 가속한 1.0 s 시점에서도 시험≈3.60 m/s, 시뮬레이션≈6.22 m/s로 시뮬레이션이 73% 과대 평가되었다.
이와 반대로, 1.5 s에는 시험≈10.5 m/s, 시뮬레이션≈12.3 m/s로 격차가 17%까지 줄었고, 발사체가 관을 빠져나갈 때의 속도는 시험≈12.4 m/s, 시뮬레이션≈12.0 m/s로 약 3% 차이로 거의 일치하였다. 이러한 결과로부터 1D 시스템 시뮬레이션이 발사체의 가속 구간에 대한 물리적 거동을 비교적 정확하게 모사하였음을 의미한다.
실험에서 관측된 발사체 속도 응답이 해석 결과에 비해 초기 지연을 보이는 원인은 복합적이다. 첫째, 발사체와 발사관 내부 가이드레일 접촉부에서는 정지 마찰과 슬라이딩 마찰이 작용한다. 특히 정지 상태에서 발생하는 초기 브레이크 어웨이(breakaway) 마찰력이 해석 모델에 적용된 마찰 계수보다 크게 작용할 경우, 발사체 초기 가속이 지연될 수 있다. 둘째, 본 연구에서 발사 속도 측정 장비는 발사체에 연결된 와이어의 풀림 속도를 이용하여 속도를 산출하는 방식을 사용한다. 이 과정에서 와이어가 발사체 이동 경로에 추가 저항을 유발할 수 있으며, 이에 따라 관측된 속도 응답에서 시간 지연이 발생하는 것으로 판단된다.
최대 속도 이후 구간에서는 시험 및 시뮬레이션 결과 간에 뚜렷한 차이가 나타났다. 이러한 이유는 1D 시스템 시뮬레이션에서는 감속 장치의 효과를 고려하지 않은 반면, 실제 시험 환경에서는 발사체가 발사관을 이탈한 직후 감속 장치가 작동하여 속도가 급격히 감소하기 때문이다.
5. 결 론
ATP 기반 수중 발사 시스템에 대해 1D 시스템 모델과 3D CFD 시뮬레이션을 연계한 통합 모델을 구축하고, 이를 통해 전체 발사 과정을 시뮬레이션 수행 및 시험 검증하여 유효성을 평가하였다.
수중 발사 시스템 모델은 압축 공기 공급의 열역학, 터빈–펌프 축 계통의 동역학, 펌프에 의한 가압수 유동 및 발사체 운동에 이르는 물리 전반의 과정을 수학적으로 모델링하였고, 터빈/펌프 성능 특성은 3D CFD 시뮬레이션 기반 성능 맵으로 보완하였다. 이러한 1D–3D 연계 시뮬레이션을 통해 터빈 회전속도(RPM), 시스템 압력, 펌프 유량, 발사체 속도 등의 주요 성능 변수를 시간 영역에서 예측할 수 있었으며, 해석 결과의 정확도와 물리적 일치도를 향상시켰다.
구축된 수중 발사 시스템 모델의 검증은 지상 시험 결과와의 비교로 수행되었다. 시험계측을 통해 얻은 터빈 RPM, 압력, 발사체 초기 속도 등의 데이터를 해석 결과와 비교하고, 그 과정에서 드러난 초기 해석치와 실측치의 차이를 분석하였다. 특히 발사 초반 가속도 과대 예측이나 RPM 응답 지연 및 오버슈트 등의 현상에 대해서는, 정지 마찰력 누락, 발사밸브 개도 지연, 펌프 부하 토크 모델 불충분 등의 원인을 규명하였다. 분석 결과를 토대로 유량계수와 토크 상수 등을 보정한 후, 시스템 모델의 결과가 실험값과 대부분 5% 이내로 일치함을 확인하였다. 해석 모델은 피크 압력, 터빈 속도, 발사체 속도 등의 거동을 정확히 재현하여 전체 시스템 동작을 충실히 모사하는 것으로 검증되었고, 이를 통해 모델의 구조적 타당성과 예측 신뢰성이 확보되었다.
본 연구의 결과로 제안된 1D–3D 연계 시뮬레이션 및 검증 기법은 실험에 의존하지 않고도 수중 발사 시스템의 성능을 예측하고 평가할 수 있는 효과적인 도구임이 입증되었다.
개발된 통합 모델은 향후 다양한 발사 조건이나 설계 변경에 대한 가상 시험에 활용할 수 있으며, 발사 성능 최적화와 제어 전략 수립에도 기여할 수 있을 것으로 기대된다. 따라서 본 연구에서 개발한 해석 프로세스는 ATP 기반 수중 무장 발사 체계 설계⋅개발에 경제적이고 신뢰할 만한 지원 수단이 될 수 있다.
Acknowledgments
이 논문은 2023년 정부(방위사업청)의 재원으로 국방기술진흥연구소의 지원을 받아 수행된 연구임(협약번호: KRIT-CT-23-002, 고압 압축공기를 이용한 터보펌프 설계 기술).
References
-
Han, M. C., Kim, J. K., and Kim, K. S., 2009, “Analysis of the Dynamic Characteristics of Pressurized Water Discharging System for Underwater Launch using ATP,” Journal of Institute of Control, Robotics and Systems, Vol. 15, No. 6, pp. 567-572.
[https://doi.org/10.5302/J.ICROS.2009.15.6.567]

- Park, I., K., and Jung, C. H., 2005, “Analysis of the Dynamic Characteristics of the Underwater Discharge System using a Linear Pump,” Journal of the Korea Institute of Military Science and Technology, Vol. 8, No. 3, pp. 11-17.
-
Lee, H. D., Heo, H. W., and Suh, Y. K., 2012, “Study on the Effect of the Impeller Diameter on the Performance of a Mixed-flow Pump,” Journal of Fluid Machinery, Vol. 15, No. 4, pp. 61-66.
[https://doi.org/10.5293/kfma.2012.15.4.061]
-
Zhuang, Q., Zhang, H., Zhao, C., Xingyu, H., Liu, Y., and Liu, Z., 2023, “Effects of the launch parameters on trans-phase stability performance and mechanism for submarine-launched missiles model,” Ocean. Eng., Vol. 283, pp. 1-13.
[https://doi.org/10.1016/j.oceaneng.2023.115083]
- Herbert, E. M., 1967, Hydraulic Control Systems, John Wiley & Sons, Inc., pp. 40-42.
- Watton, J., 1989, Fluid Power Systems, Prentice Hall, Inc., pp. 97-98.
- Newman, J. N., 2018. Marine Hydrodynamics. The MIT press.
- Park, I. K., and Jung, C. H., 2005, “Analysis of the Dynamic Characteristics of the Underwater Discharge System using a Linear Pump,” Journal of the KIMST, Vol. 8, No. 3, pp. 11-17.
- Baek, S. H., Kang, W. T., Jeong, J. H., Choi, Y. D., and Choi, K. H., 2016, “Parameter Screening in Model Calibration of Experimental Test via Simulation Using Global Sensitivities,” The Winter Conference of the Korean Society for Fluid Machinery, pp. 219-220
-
Mo, J. O., Kim, B. S., Kim, M. E., Choi, Y. D., and Lee, Y. H., Baek, S. H., Kang, W. T., Jeong, J. H., Choi, Y. D., and Choi, K. H., 2011, “Software Development for the Performance Evaluation and Blade Design of a Pitch-Controlled HAWT based on BEMT,” The KSFM Journal of Fluid Machinery, Vol. 14, No. 2, pp. 5-10.
[https://doi.org/10.5293/KFMA.2011.14.2.005]
- ANSYS Inc. 2024, ANSYS Fluent Theory Guide Release 2024. USA.